
- 德国Klauke柯劳克
- 日本HONDA本多
- 日本ADCMT爱德万
- 日本尾崎PEACOCK
- 日本滨松HAMAMATS...
- 日本USHIO牛尾
- 日本松下Panasoni...
- 日本YUMEX优美科思
- 日本INFLIDGE英富...
- 日本SURUGA SEI...
- 渡边电气工业株式会社
- 矢岛光学
- Asker
- CEDAR
- KOEI
- Tokuden
- HIOS
- NCC
- PRINCE
- veccl
- MYCOM
- KALMOR
- RICOH
- 日本ST
- 日本miruc
- PONY
- 仓敷化工株式会社
- NPM
- 闭环步进电机PULSER...
- 同步电机
- 步进电机
- 直线步进电机
- 直线伺服电机
- 设施
- 温度计
- 隔膜压力表
- 波登管压力表
- GPD型仪表保护器
- 台式油压机
- 退磁、退磁设备及相关设备
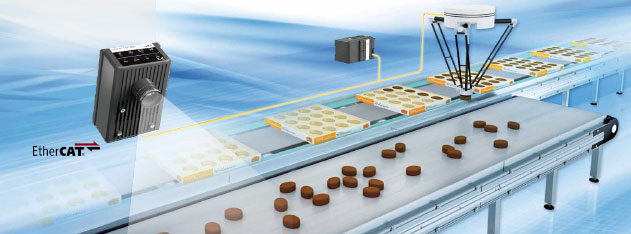
智能照相机引导机器人!
新的FQ-M系列是专为取放应用而设计的视觉传感器。它配备嵌入的EtherCAT,可在任何环境中轻松集成。FQ-M紧凑、快速,并且含有用于轻松跟踪校准的增量编码器输入。
欧姆龙的Sysmac Studio软件是配置FQ-M的**工具,它与触摸探测器控制器配合,用于现场监控。
易于设置和集成
利用校准和通信的智能向导,与机器的集成将****地轻松。FQ-M通过EtherCAT或标准Ethernet与所有设备通信。使用通信向导可轻松将任何机器人协议配置为服务器或客户端,而无需复杂的编程。
快速的检测和较高的可靠性
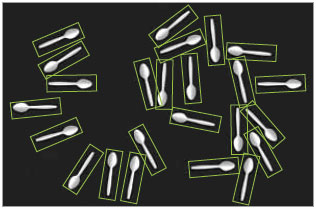
FQ-M可一次检测高达32件,每分钟超过5000件。新的基于轮廓的检索算法可确保*高的可靠性。
“即时”跟踪
由于FQ-M视觉传感器具有可实现准确的传送带跟踪和轻松校准的内置编码器输入,因此,同步操作更为轻松。FQ-M可输出位置坐标和相关编码器值并且管理物体队列,因此不会重复物体的坐标。
易于根据运动设置和与集成

针对取放机器人的可编程输出格式
配置为服务器或客户端,无需复杂编程。

用于快速配置的Sysmac Studio
Sysmac Studio软件的视觉编辑器将有助于对*佳视觉设定编程。直观且图标驱动的设置和配置。

用于现场监控的触摸探测器
通过可放入手掌的直观触摸探测器控制台,可快速且轻松访问所有功能和设定。快速的检测和较高的可靠性
新的基于轮廓的检索算法为取放应用带来****的性能。变化的照明条件、反射、物体倾斜或部分隐藏的物体不再是问题。无论同时检测的物体数量多少,即便高速时,FQ-M也可获得稳定的结果。
同类*佳的性能
360°检测、每分钟5000件的高速处理。
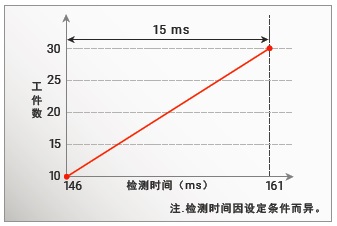
一次检测10个物体或30个物体,时间差仅15ms。
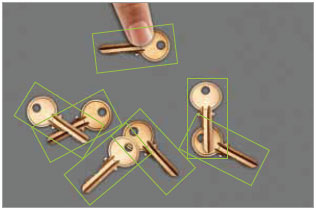
即便物体重叠或部分隐藏,也可进行稳定且可靠的检测。
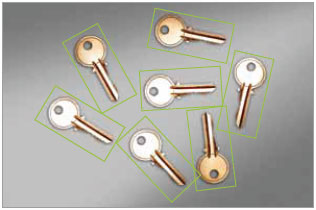
变化的光源条件不会影响位置的精度。
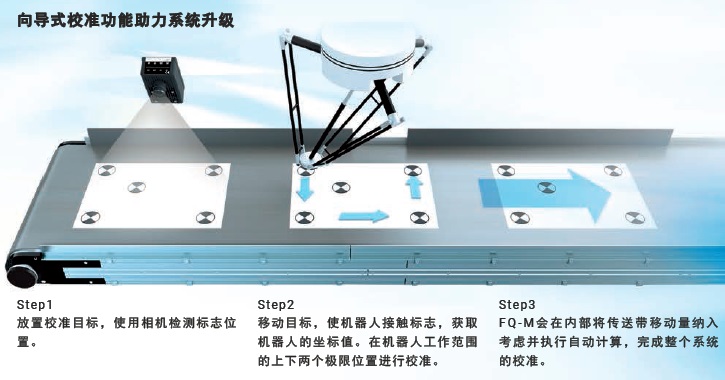
简化校准和跟踪的编码器输入
全景视图-实现理想物体检测的参数设定
可从3帧不同的图像创建一个全景视图,从而轻松进行参数优化。
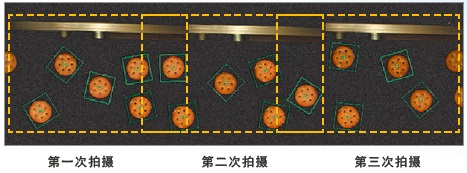
隔离在不止一个视野之内重叠的物体,并且仅插入拾取队列一次。
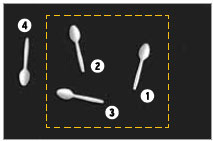
**张图片
检测物体1、2和3的位置和方向,并且将其添加到拾取队列。
下一张照片
检测物体2、3和4,但仅评估物体4的数据。由于物体2和3的位置和方向已在此次拍摄之